




Hardware

All active stereo systems have two main components: an imager and an energy input to the system. Here I use a Logitech QuickCam Fusion for imaging. This camera works reasonably well in both Linux and Windows once the drivers are worked out. The Linux drivers have a few bugs so you might have to rmmod uvcvideo and modprobe uvcvideo a few times. I chose this camera on the basis that it was lying around.
To project a line in the scene I use a standard 3V laser pointer. There's not much to it -- apply 3Vs and it turns on.

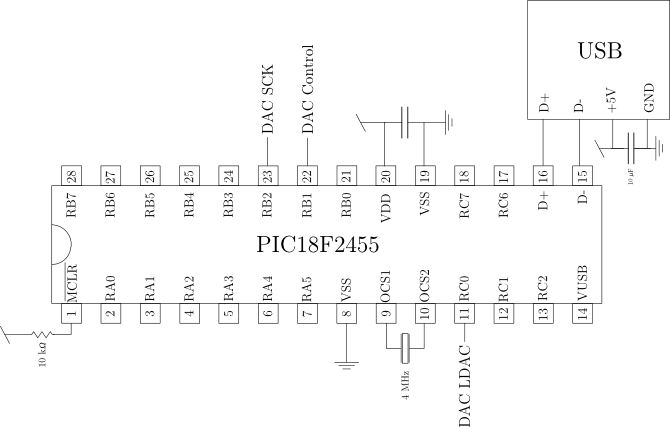
To scan the laser pointer's dot (making it a line) and to control its location, I use a PIC18F2455 attached to a MCP4922 DAC and two OPA551 operational amplifiers. The output of the op-amps is connected to two galvanometers which have mirrors mounted on them. Thus, the PIC generates a sine wave for one mirror, creating a line. The host computer then commands the second mirror's location via USB.